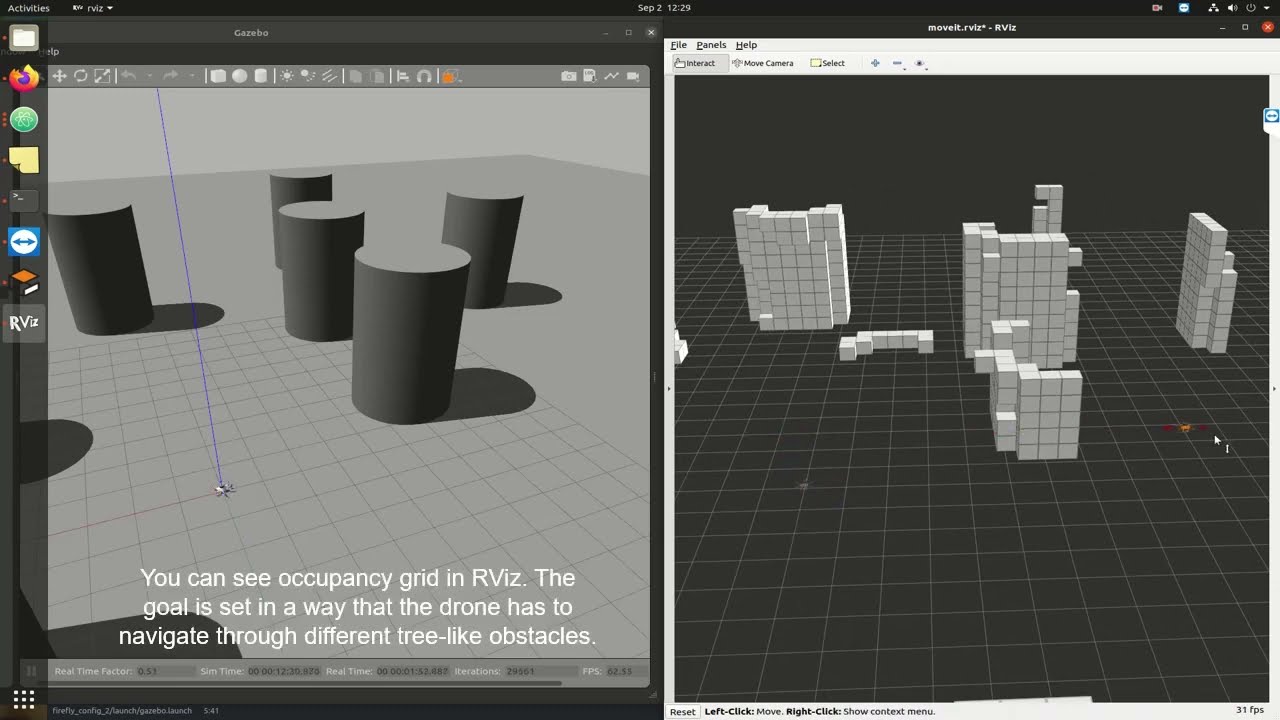
Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Random tree environment Mahathi Bhargavapuri 1:13 2 years ago 195 Далее Скачать
Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Realistic city environment Mahathi Bhargavapuri 1:56 2 years ago 382 Далее Скачать
Autonomous drone simulation using ROS and Gazebo @ UniBW Munich | Basic environment Mahathi Bhargavapuri 2:04 2 years ago 116 Далее Скачать
Agriculture Drone simulation using ROS Gazebo and Tracking drone position with rospy Krishnakanth Yachareni 0:59 3 years ago 343 Далее Скачать
ROS and Autonomous UAV - Drone | Gazebo | DroneKit SITL Gökhan Atalı 6:23 3 years ago 3 538 Далее Скачать
LARS 2024: Photo-Realistic and Labeled Synthetic UAV Flight Data Generation Using ROS and Gazebo MaVILab @ UFV 1:57 3 weeks ago 17 Далее Скачать